|
【控制要求】
在人機(jī)界面(顯示屏)實(shí)現(xiàn)對(duì)運(yùn)動(dòng)軸的啟動(dòng)停止和手動(dòng)正轉(zhuǎn)、手動(dòng)反
轉(zhuǎn)以及機(jī)械回零操作���。 【控制流程圖】
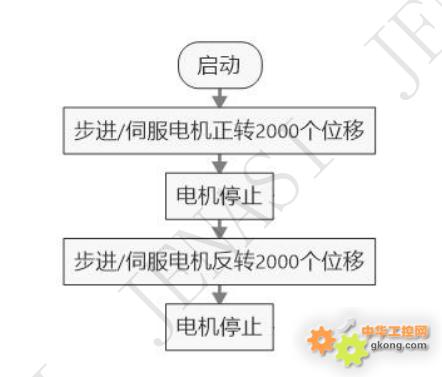
1�、運(yùn)動(dòng)軸啟動(dòng)程序流程圖:
2���、運(yùn)動(dòng)軸回零程序流程圖:

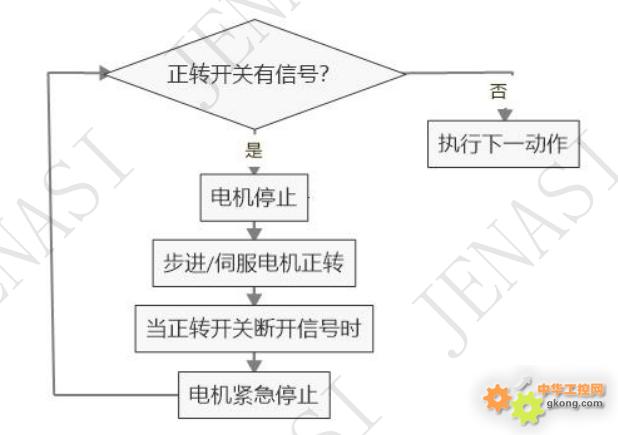
3�、運(yùn)動(dòng)軸手動(dòng)正反轉(zhuǎn)程序流程圖:
正轉(zhuǎn):
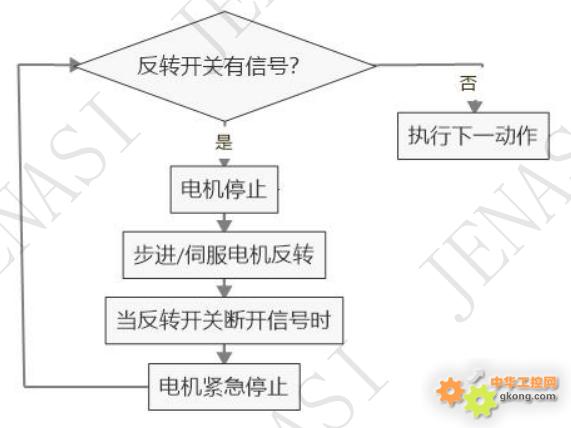
反轉(zhuǎn):
4�、運(yùn)動(dòng)軸急停設(shè)置:添加急停按鍵,控制所有的動(dòng)作斷開�,復(fù)位。
5�、運(yùn)動(dòng)軸脈沖清零設(shè)置:添加清零按鍵,對(duì)脈沖位置清零����。
【組件說明】
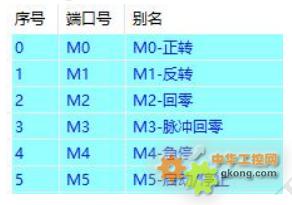
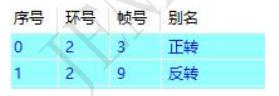
1�、輔助標(biāo)志別名:在界面上實(shí)現(xiàn)按鍵����,需要用到 PLC 中的輔助標(biāo)志:
M。(不能直接添加輸入 X 端����,因?yàn)?X 端為外部信號(hào),不能在界面上操
作�,只能在界面上監(jiān)控。)
2�、時(shí)序環(huán)幀別名:對(duì)時(shí)序環(huán)中的指令幀進(jìn)行別名,選用的時(shí)候����,可
以選擇別名模式,這樣能更精準(zhǔn)的找到所需的指令幀���。此處別名可編輯
完程序之后�,對(duì)應(yīng)指令所在的幀進(jìn)行別名�。
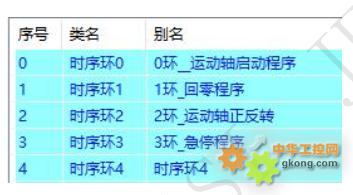
3、類視圖別名:對(duì)時(shí)序環(huán)名稱進(jìn)行別名,更容易區(qū)別于每個(gè)時(shí)序環(huán)編輯的是哪一段程序��。
【PLC 程序編輯】
在時(shí)序環(huán)編輯程序�����,每個(gè)環(huán)都能編輯獨(dú)立的程序��。
1���、在時(shí)序環(huán) 0 編輯運(yùn)動(dòng)軸的啟動(dòng)程序:
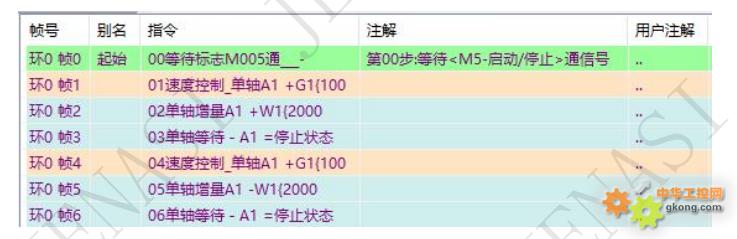
添加“等待標(biāo)志 M5”表示啟動(dòng)/停止按鍵,再添加“單軸運(yùn)動(dòng)”指令����,軸
1 以“增量”的方式正向運(yùn)行 2000 個(gè)位移,需要等軸運(yùn)行完成之后再進(jìn)行
反轉(zhuǎn)����,必須添加“單軸等待”表示電機(jī)正轉(zhuǎn)完成,停止����;接著添加“單軸運(yùn)
動(dòng)”指令,軸 1 以“增量”的方式反向運(yùn)行 2000 個(gè)位移��,再“單軸等待”表
示電機(jī)反轉(zhuǎn)完成,停止���。
2�����、在時(shí)序環(huán) 1 編輯運(yùn)動(dòng)軸的回零程序:

添加“等待標(biāo)志 M2”表示回零按鍵��,再添加“單軸操作”指令����,選擇回
零方向:正向(正向和負(fù)向:均會(huì)回零���,遇到極限會(huì)返回重新回零)����,
最后添加“單軸等待”表示電機(jī)回零完成�����,停止�����。
3、在時(shí)序環(huán) 2 編輯運(yùn)動(dòng)軸的手動(dòng)正反轉(zhuǎn)程序:
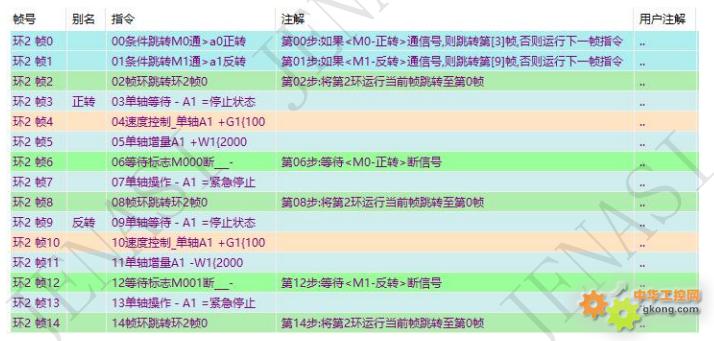
手動(dòng)正反轉(zhuǎn)可以在同一個(gè)時(shí)序環(huán)����,通過條件選擇的指令來進(jìn)行正反轉(zhuǎn)
的動(dòng)作:
添加程序選擇指令:正轉(zhuǎn)和反轉(zhuǎn)。
①第 0 幀����,添加第 1 條指令:“條件跳轉(zhuǎn) M0(通):若 M0 有信號(hào)
時(shí),根據(jù)別名“正轉(zhuǎn)”跳轉(zhuǎn)至 2 環(huán)幀 3��,若 M0 無信號(hào)時(shí)�����,則執(zhí)行下一幀
指令”���;
②第 1 幀�,添加第 2 條指令:“條件跳轉(zhuǎn) M1(通):若 M1 有信號(hào)
時(shí)����,根據(jù)別名“反轉(zhuǎn)”跳轉(zhuǎn)至 2 環(huán)幀 8,若 M1 無信號(hào)時(shí)���,則執(zhí)行下一幀
指令”�;
③第 2 幀,添加第 3 條指令:“幀環(huán)跳轉(zhuǎn):運(yùn)行至當(dāng)前指令���,將動(dòng)作
跳轉(zhuǎn)至 0 幀�����,此處為絕對(duì)跳轉(zhuǎn)���,只要前面的條件不滿足往下執(zhí)行到該指
令,就會(huì)繼續(xù)跳回 0 幀檢測(cè)信號(hào)”��。
添加正轉(zhuǎn)程序��。
④第 3 幀��,開始添加正轉(zhuǎn)動(dòng)作程序��,先檢測(cè)運(yùn)動(dòng)軸為停止?fàn)顟B(tài)����,添加
“單軸等待:停止?fàn)顟B(tài)”。
⑤第 4 幀��,再添加“單軸運(yùn)動(dòng):增量方式,正向運(yùn)行��,位移值可設(shè)置
成 2000”����。
⑥第 5 幀,添加“等待標(biāo)志:M0 斷”���,也就是檢測(cè)到正轉(zhuǎn)信號(hào) M0 斷
開時(shí),此時(shí)電機(jī)要停止��,再往下添加指令����。
⑦第 6 幀,添加“單軸操作:緊急停止”��,運(yùn)行到該指令時(shí)��,電機(jī)緊急
停止���。
⑧第 7 幀����,添加指令:“幀環(huán)跳轉(zhuǎn):運(yùn)行至當(dāng)前指令,將動(dòng)作跳轉(zhuǎn)至
0 幀��,此處為絕對(duì)跳轉(zhuǎn)���,只要前面的條件不滿足往下執(zhí)行到該指令��,就
會(huì)繼續(xù)跳回 0 幀檢測(cè)信號(hào)”�����。
添加反轉(zhuǎn)程序����。
⑨第 8 幀�����,開始添加反轉(zhuǎn)動(dòng)作程序���,先檢測(cè)運(yùn)動(dòng)軸為停止?fàn)顟B(tài)����,添加
“單軸等待:停止?fàn)顟B(tài)”。
⑩第 9 幀�����,再添加“單軸運(yùn)動(dòng):增量方式����,反向運(yùn)行,位移值可設(shè)置
成 2000”��。
?第 10 幀,添加“等待標(biāo)志:M1 斷”�����,也就是檢測(cè)到正轉(zhuǎn)信號(hào) M1
斷開時(shí)�����,此時(shí)電機(jī)要停止���,再往下添加指令��。
?第 11 幀�����,添加“單軸操作:緊急停止”�����,運(yùn)行到該指令時(shí)���,電機(jī)緊
急停止�。
?第 12 幀�����,添加指令:“幀環(huán)跳轉(zhuǎn):運(yùn)行至當(dāng)前指令���,將動(dòng)作跳轉(zhuǎn)至
0 幀�����,此處為絕對(duì)跳轉(zhuǎn),只要前面的條件不滿足往下執(zhí)行到該指令���,就
會(huì)繼續(xù)跳回 0 幀檢測(cè)信號(hào)”�。
4�、在時(shí)序環(huán) 3 編輯運(yùn)動(dòng)軸的急停程序:
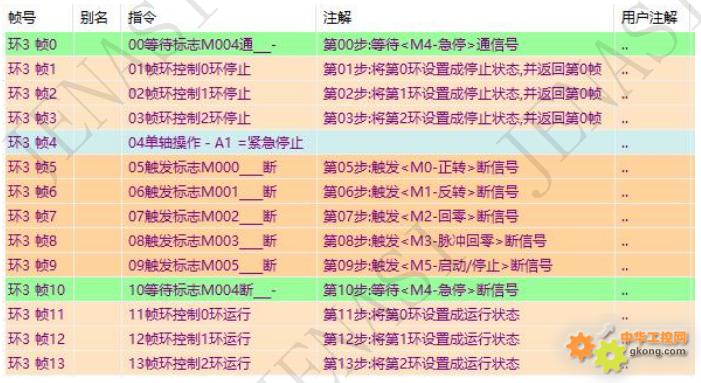
①第 0 幀���,添加第 1 類指令:“等待標(biāo)志 M4(通):若 M4 有信號(hào)
時(shí),就開始執(zhí)行急停程序�,起到復(fù)位的作用�����。
②第 1-3 幀,添加第 2 類指令:“幀環(huán)控制:停止���。設(shè)置了幾個(gè)時(shí)序
環(huán)就添加幾條幀環(huán)控制指令����,將除去急停環(huán)的其他所有環(huán),控制為停止
狀態(tài)��,如 0 環(huán)�����、1 環(huán)和 2 環(huán)為停止?fàn)顟B(tài)并返回 0 幀���。
③第 4-9 幀�����,添加第 3 類指令:“觸發(fā)指令:觸發(fā)所有的輸出��、標(biāo)志
斷開�,運(yùn)動(dòng)軸用“單軸操作指令:緊急停止”����,停止運(yùn)行。
⑤第 10 幀���,添加第 4 類指令:觸發(fā)標(biāo)志 M4(斷):若 M4 無信號(hào)
信號(hào)了��,急停程序結(jié)束,每個(gè)環(huán)都是復(fù)位的狀態(tài)����。
⑥第 11-13 幀����,添加第 5 類指令:“幀環(huán)控制:運(yùn)行���。設(shè)置了幾個(gè)時(shí)
序環(huán)就添加幾條幀環(huán)控制指令�,將除去急停環(huán)的其他所有環(huán)��,控制為運(yùn)
行狀態(tài)���,如 0 環(huán)����、1 環(huán)和 2 環(huán)為運(yùn)行狀態(tài)�。
5、在組合邏輯編輯運(yùn)動(dòng)軸的脈沖清零程序:

添加“等待標(biāo)志 M3 通”(組長)���,再“觸發(fā)標(biāo)志 M3 斷”(組員)����,再
添加清零計(jì)算:賦值運(yùn)算:P[1]=D[0]+D[0]�����。其中 D 表示數(shù)值寄存器,
ID 就是數(shù)值寄存器的值���,如 D[0]=0����,D[1]=1���,D[2]=2......
|

