據(jù)研究數(shù)據(jù)表明����,水域中的廢棄物約有 70% 會沉入海底或分解成微塑料和納米塑料��,總量高達(dá) 1000 萬噸�。在 MAELSTROM 開展的一個研究項(xiàng)目中,他們以人工智能系統(tǒng)為基礎(chǔ)�����,開發(fā)了一種自主式機(jī)器人��,它可以在 20 米深水域處選擇性地識別和收集廢棄物���。該系統(tǒng)通過基于 PC 的控制技術(shù)自動控制�����,已于 2022 年 9 月在威尼斯運(yùn)河通過了試運(yùn)行����。
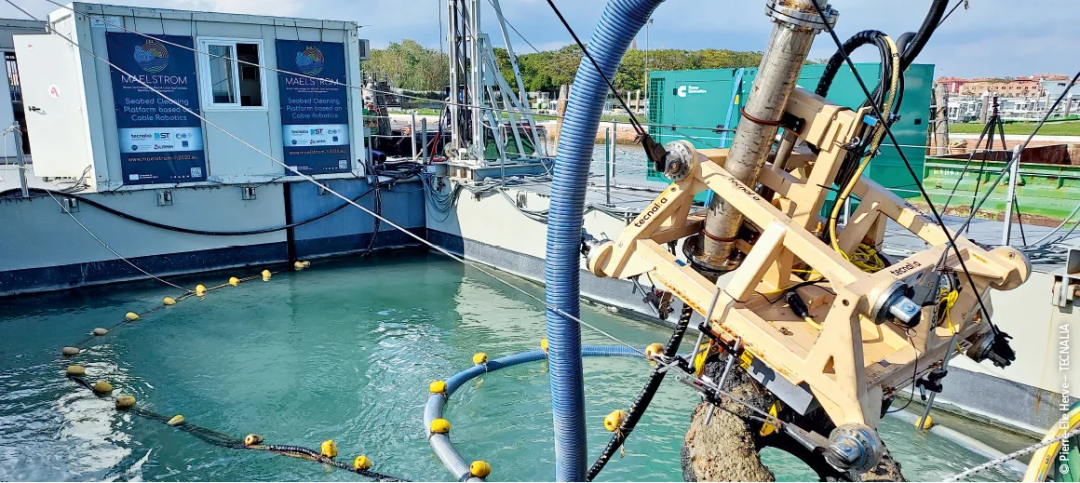
如果想要防止垃圾危害脆弱的水下生態(tài)系統(tǒng),或者防止微塑料和納米塑料通過食物鏈進(jìn)入我們的身體�,就必須阻止水域受到進(jìn)一步污染,清理水下垃圾�。這正是歐盟“地平線 2020” — MAELSTROM 項(xiàng)目的目標(biāo):開發(fā)和整合各項(xiàng)技術(shù),以識別�、清除、分揀各類海洋垃圾并將其轉(zhuǎn)化為原材料��。為此���,一個由西班牙 TECNALIA 研究院、法國 CNRS-LIRMM 機(jī)器人研究所和意大利 Servizi Tecnici 公司組成的國際研究小組開發(fā)了“海底垃圾清理機(jī)器人”�����。其核心是一個配備抓手和抽吸裝置的水下機(jī)器人�,借助 8 個絞盤在六個自由度內(nèi)靈活移動。
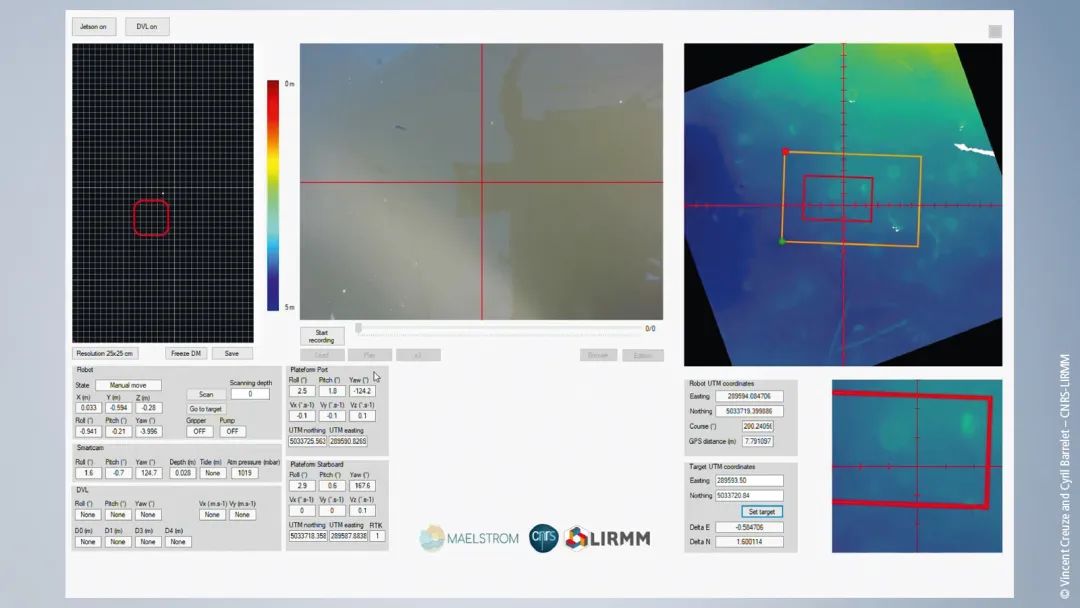
手動控制顯示屏:操作人員可以看到水深測量地形圖�。該圖定位在機(jī)器人平臺的內(nèi)部區(qū)域(橙色矩形)的中心。紅色矩形表示安全工作區(qū)域���,機(jī)器人平臺與纜索之間不會發(fā)生碰撞���。下方區(qū)域表示鋼纜的拉伸應(yīng)力�。
機(jī)器人通過傳感器和攝像頭探測海底垃圾���,自動將自己定位在垃圾上方�,并能舉起重達(dá) 130 公斤的物體(包括自行車�、輪胎、箱子和魚網(wǎng))����。較小的物體或漂浮在水面上的塑料垃圾則通過抽吸裝置收集。“由于我們是在海面上作業(yè)�����,只有在需要時才啟動抓手或抽吸裝置���,因此我們可以實(shí)現(xiàn)高選擇性���,最大限度地減少對海底生態(tài)系統(tǒng)的影響。”來自 TECNALIA 的 MAELSTROM 項(xiàng)目經(jīng)理 Mariola Rodríguez 解釋道�。
定位絞盤由倍福的 AX5118 伺服驅(qū)動器和 AM8071 伺服電機(jī)同步控制。“為了確保穩(wěn)健��、精確和快速定位,我們選擇了無刷同步伺服電機(jī)��。”TECNALIA 纜索機(jī)器人團(tuán)隊(duì)的電子工程師 Jose Gorrotxategi 指出����。另一個優(yōu)勢是驅(qū)動器采用了單電纜技術(shù)(OCT),減少了絞盤的布線工作和空間需求��。絞盤鋼索可確保機(jī)器人支架在水下精確定位�,并在水流湍急的情況下保持高穩(wěn)定性。電機(jī)軸上的編碼器可檢測電纜卷筒的角度位置和轉(zhuǎn)數(shù)�����,從而間接確定盤繞電纜的長度�����。
電磁制動器和力傳感器對纜索張力的監(jiān)測確保了應(yīng)用所需的安全性���。如果測量結(jié)果超出允許范圍,纜索機(jī)器人會立即停止工作����,并顯示錯誤信息。
水上水下傳感器集群
水下纜索機(jī)器人支架內(nèi)裝有多個傳感器和攝像頭用于控制和監(jiān)測,支持手動��、自動和遠(yuǎn)程操作���。“只要水下能見度不是太低��,就能手動控制攝像頭和照明燈�����。”TECNALIA 纜索機(jī)器人團(tuán)隊(duì)的機(jī)械工程與控制工程師 Pierre-Elie Herve 補(bǔ)充道�����。操作人員可以點(diǎn)擊攝像頭畫面中感興趣的海底位置����,機(jī)器人就會自動靠近這些位置��。機(jī)器人支架上的壓力傳感器可檢測潛水深度�,慣性測量單元(IMU)可控制機(jī)器人在水中的位置。多普勒速度儀(DVL)通過四個聲納傳感器記錄移動平臺與海底的距離及其相對速度����。
其它傳感器(包括一個壓力傳感器)放置在水上浮橋上����,用于在深度控制過程中補(bǔ)償大氣壓力的變化����。兩個 GPS 實(shí)時動態(tài)定位裝置實(shí)時確定駁船的位置和垂直方向。來自這些不同系統(tǒng)的所有數(shù)據(jù)都被整合到機(jī)器人的控制和位置調(diào)節(jié)系統(tǒng)中�����。例如�����,根據(jù)這些數(shù)值�,機(jī)器人平臺可以精確接近并保持之前在深度圖(水深測量地形圖)上選定的位置,從而提高機(jī)器人的工作效率��。“這種能力已經(jīng)在威尼斯瀉湖非常渾濁的水域中得到了充分彰顯�����。”Mariola Rodríguez 指出���。
纜索機(jī)器人的控制和通信
水下電纜機(jī)器人共有 12 根軸(8 個絞盤和浮橋桅桿上的 4 個垂直活動滑塊)��,由 C6650 控制柜式工業(yè) PC 中安裝的 TwinCAT 3 控制��。工業(yè) PC 安裝在控制室的主控制柜中��。除了索力監(jiān)測之外����,系統(tǒng)(控制室��、無線操控和絞盤)上的多個急停按鈕也可確保機(jī)器人安全運(yùn)行�����。相應(yīng)的安全邏輯由 TwinSAFE 邏輯端子模塊 EL6910 執(zhí)行���。帶抱閘的伺服驅(qū)動器通過 AX5805 TwinSAFE 驅(qū)動器選項(xiàng)卡集成到安全應(yīng)用中��。
另外四個配電模塊分散安裝在內(nèi)含 I/O 接口模塊和索力測量電子裝置的纜索絞盤上�����?���?刂乒衽c配電模塊之間的連接通過 Ethercat P 完成。Jose Gorrotxategi 評論道:“EtherCAT 技術(shù)的這一擴(kuò)展使得直流供電和 EtherCAT 實(shí)時通信能夠通過一根電纜實(shí)現(xiàn)�。”

AX5118 伺服驅(qū)動器控制纜索機(jī)器人的八個絞盤驅(qū)動裝置以及底座托架的四根軸。
機(jī)器人平臺控制
操作人員通過操縱桿以及水下移動平臺的估計位置和移動平臺上的攝像頭控制纜索機(jī)器人�。除了通過水下攝像頭進(jìn)行視覺控制之外,操作人員還可以通過 HMI 選擇不同的控制模式���,并根據(jù)傳感器數(shù)值監(jiān)測所有功能�。
用于水下感知的攝像機(jī)系統(tǒng)主要實(shí)現(xiàn)視覺伺服控制:操作人員一旦看到海洋垃圾(由于水比較渾濁�,距攝像頭的距離相對較短),就可以點(diǎn)擊攝像頭畫面中的垃圾���,纜索機(jī)器人的移動平臺就會自動靠近垃圾���。
HMI 中還集成了通過 DVL 系統(tǒng)和攝像頭創(chuàng)建的深度圖。操作人員可以選擇畫面中的任意一個位置�,然后移動平臺就會向該位置移動。除了手動操作之外�����,支架還能自動識別�、鎖定和收集垃圾。“人工智能是實(shí)現(xiàn)這一切的基礎(chǔ)����,它能夠識別海洋垃圾,并選擇最合適的清除裝置����。”Pierre-Elie Herve 解釋道。
針對海底垃圾清理機(jī)器人平臺開發(fā)的軟件可以實(shí)時計算機(jī)器人的地理位置���,這要?dú)w功于實(shí)時全球定位系統(tǒng)(實(shí)時動態(tài)測量或 RTK)和負(fù)責(zé)測量和報告位置或方向并同時監(jiān)測和控制絞盤的慣性測量裝置����。此外����,海底地形圖上會顯示機(jī)器人和垃圾位置。機(jī)器人既可以自主移動����,通過軟件確定“水中的運(yùn)動軌跡”,也可以通過操縱桿手動控制����。機(jī)器人移動時,攝像頭和聲學(xué)傳感器會掃描海底�����,測量深度(水深)并探測垃圾。這些數(shù)據(jù)都有地理坐標(biāo)����,并在地形圖上實(shí)時顯示。
關(guān)于德國倍福
倍福(Beckhoff)是一家專注于自動化新技術(shù)的德資企業(yè)���,創(chuàng)立于 1980 年�����,總部位于德國威爾市��。作為全球自動化技術(shù)的驅(qū)動者�,倍福定義了自動化領(lǐng)域的許多標(biāo)準(zhǔn)����,是國際標(biāo)準(zhǔn)的制定者和推動者。公司所生產(chǎn)的工業(yè) PC�����、現(xiàn)場總線模塊、驅(qū)動產(chǎn)品和 TwinCAT 自動化軟件構(gòu)成了一套完整的��、相互兼容的控制系統(tǒng)����,可為各個工控領(lǐng)域提供開放式自動化系統(tǒng)和完整的解決方案��。經(jīng)過 40 年的發(fā)展和努力����,倍福已在世界各地設(shè)立 30 多家分支機(jī)構(gòu),加上全球的合作伙伴��,業(yè)務(wù)遍及 70 多個國家和地區(qū)��。
倍福于 1997 年進(jìn)入中國市場��,中國區(qū)總部落戶于上海市北高新產(chǎn)業(yè)園區(qū)����,現(xiàn)有員工 300 人,辦事處遍及國內(nèi) 30 座大中城市���。創(chuàng)新產(chǎn)品和解決方案廣泛應(yīng)用于風(fēng)力發(fā)電���、半導(dǎo)體��、光伏太陽能���、電子制造、金屬加工�����、包裝機(jī)械��、印刷機(jī)械�����、塑料加工���、輪胎加工����、木材加工�����、玻璃機(jī)械、物流輸送以及樓宇自動化等眾多領(lǐng)域����。
公司傾力推廣的 EtherCAT 實(shí)時工業(yè)以太網(wǎng)于 2014 年成為中國國家推薦性標(biāo)準(zhǔn),并已入編工信部的《國家智能制造標(biāo)準(zhǔn)體系建設(shè)指南》��。作為一家技術(shù)驅(qū)動型公司�����,倍福一直注重在技術(shù)上尋求突破創(chuàng)新�����,在業(yè)內(nèi)享有“創(chuàng)新引擎”的美譽(yù)����。倍?;?PC 的控制技術(shù)具有良好的開放性,它支持所有主流的工業(yè)通信協(xié)議���,將 IT 技術(shù)�、互聯(lián)網(wǎng)和自動化技術(shù)完美融合在一起���,為實(shí)現(xiàn)工業(yè) 4.0 和智能制造奠定了堅(jiān)實(shí)的技術(shù)基礎(chǔ)�����。
更多新聞?wù)垶g覽: https://www.beckhoff.com.cn